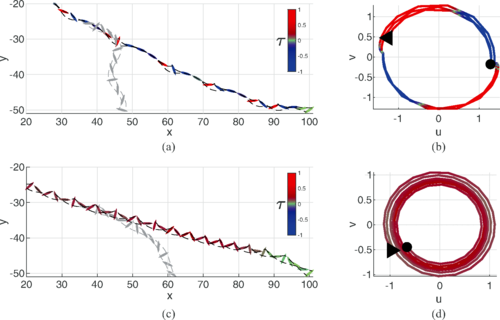
Controlled gliding and perching through deep-reinforcement-learning
https://softmath.seas.harvard.edu/wp-content/uploads/2019/10/medium_1.png320500Academic Web Pages/wp-content/uploads/2018/09/clear.pngAcademic Web Pages2019-10-05 15:16:002025-02-27 15:13:19Controlled gliding and perching through deep-reinforcement-learning



 Prof. L. Mahadevan
Prof. L. Mahadevan Follow us on Twitter
Follow us on Twitter
 Size control of the inner ear via hydraulic feedback
Size control of the inner ear via hydraulic feedback