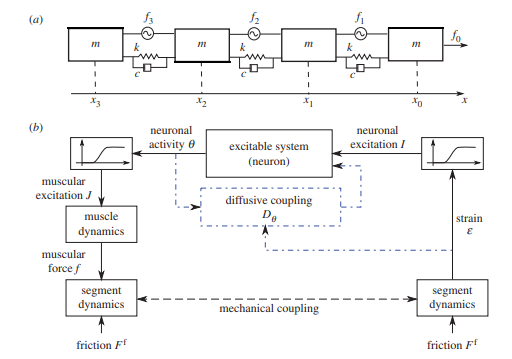
A proprioceptive neuromechanical theory of crawling
https://softmath.seas.harvard.edu/wp-content/uploads/2019/10/78.png359512Academic Web Pages/wp-content/uploads/2018/09/clear.pngAcademic Web Pages2014-10-16 13:52:002025-02-27 15:12:32A proprioceptive neuromechanical theory of crawling



 Prof. L. Mahadevan
Prof. L. Mahadevan Follow us on Twitter
Follow us on Twitter
 The dynamics of sperm cooperation in a competitive environment
The dynamics of sperm cooperation in a competitive environment